二零零三年來自英國曼徹斯特大學物理暨天文系傑姆教授 (Andre Geim) 的研究團隊,他們挑選出具有良好材料性質的高分子聚合物材料 — 聚亞醯胺 (polyimide) ,並透過 成本昂貴的電子束微影 (electron beam lithography) 技術及乾蝕刻製程作出 規則排列的剛毛陣列,進而完成令人眼睛為之一亮的壁虎貼布,礙於製造上的成本考量此貼布大小僅為 0.5 平方公分,而無法作出更大的面積,不過此小小的壁虎貼布卻能提供大於一百公克的支撐量,將一個 十五公分 高、四十公克重的蜘蛛人玩偶吊掛在天花板上,即使現今科學家所能達到的成果遠大於當初傑姆教授展示的壁虎貼布,但在當時這可算是相當新奇的一件事,不過這樣的貼布缺點還是相當的多;除了製造成本居高不下,重覆使用的耐久性也是很大問題;貼布上的聚合物剛毛即便能產生有效的黏著,在拉離時卻也容易造成斷裂,也會因凝聚現象而塌陷於膠帶的基底上降低黏著特性。不像壁虎腳上那天然的角質素剛毛,人造材料缺乏足夠的強度與彈性始終是亟待解決的困難。



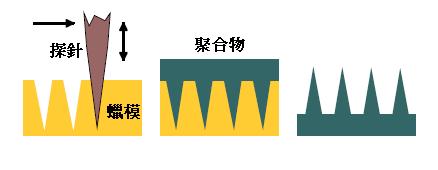
《圖 32
左:英國曼徹斯特大學教授安德里 - 傑姆 (Andre Geim) 模仿壁虎機制, 以電子束微加工製程建立「壁虎貼布」的雛型 中:人造剛毛陣列同樣顯示出凝聚的現象 右:透過蜘蛛人玩偶展示出壁虎貼布令人驚奇的效果
》Geim , AK , Dubonos, SV, Grigorieva, IV, Novoselov , KS , Zhukov, AA, Shupoval, SY, "Microfabricated adhesive mimicking gecko foot-hair," Nature Mater. 2, 461-463, 2003.
不同的嘗試
—
奈米碳管應用
隨著多層奈米碳管 (multiwalled carbon nanotubes) 技術的成熟,最近二零零五年 來自美國 壬色列理工學院的阿則葉教授 (Pulickel Ajayan) 與 俄亥俄州亞克朗大學化學工程研究所的研究生貝杜爾•亞杜碼肯 (Betul Yurdumakan) 等人共同 提出一套化學氣相沉積的製程技術,可形成孔隙度約 87% 的開放式發泡體 (open-cell foam) 薄膜結構,製造出垂直排列的碳奈米管陣列,由於奈米碳管兼具強度與彈性,擁有良好的機械性質,且此 種 以多層奈米碳管為基礎的新結構更發現能構成強大的黏著性能,創造出與壁虎腳底纖毛相似或更強的乾式黏著能力,經量測後發現,此結構在奈米等級下所量測到的力量 遠勝於壁虎腳底剛毛達兩百倍之多, 然而以奈米碳管製作大面積壁虎貼布的可行性仍然相當低,除了在成本上並不經濟,另一方面奈米碳管對人體的影響至今仍尚無定論,剛毛脫落與斷裂也依舊是會發生的現象,因此在製程與經濟效益的評估上,還有相當大的進步空間,不過這樣的研究成果無疑是為完美的壁虎貼布帶來另一道不同的曙光。
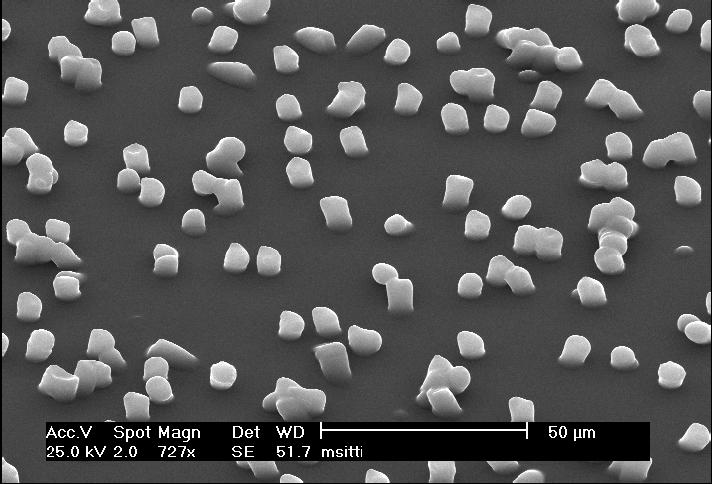
《圖 33
多層奈米碳管準直的 SEM 照片。左:矽材上以化學氣相沉積法成長(約 65mm) 右;轉移至 PMMA 基材以 0.5 μ m min-1 蝕刻率進行蝕刻後,其加工表面上的SEM照片。奈米等級下具強大黏著 力量,遠勝於壁虎纖毛 200 倍
》Yurdumakan B., Raravikar N. R., Ajayan P. M. & Dhinojwala A. "Synthetic gecko foot-hairs from multiwalled carbon nanotubes," Chem. Commun. 3799–3801. 2005.
人造剛毛「壁虎化」
二零零五年來自美國加州大學聖芭芭拉分校機械暨環境工程系的特娜博士 (Kimberly L. Turner) 有了相當傲人的成果。因有感於壁虎層次結構在黏著上的優越性,專精 MEMS 技術的她於是運用微機電製程成功創造出整體化多尺度順從結構 ( Multi-scale Integrated Compliant Structures, MICS ) ,這也是首次在 矽晶圓上 成功的以成批生產技術 ( batch fabrication techniques) 製造出面積為一平方公分的黏著平板,雖然面積不大,但在這小小的天地之中卻有著二千五百個多層次結構排列而成的陣列,之中的每一個結構主要皆由居中的晶片構成,此薄板因微影製程因而具有多樣的幾何外形並極富可彎曲性,隨後覆蓋準直排列的有機桿 (organorods) ,並於晶片中心點下方以具有高度高寬比的單晶矽圓柱作支撐,整體來看此結構共具有三種層級,分別為高度約 50 μ m ,直徑由下往上遞減為 1 μ m 的支撐柱 ( 剛毛 ) ;厚度在 2 μ m ,邊長為 100 μ m 與 150 μ m 的矽晶片 ( 分叉 ) ,以及晶片上那些接近 2 μ m 高,直徑為 50 μ m 到 200 μ m 的有機桿 ( 匙突 ) 。整體看來就有如壁虎剛毛上的層次化結構,如此大費周章的結果究竟有沒有幫助?答案當然是肯定的,經測試檢驗後發現,這樣的層次結構比起傳統單層狀態下的黏著,於性能上有明顯地提升,此外研究過程還意外發現增加表面的疏水特性也能進一步提高黏著的力量,因而推測疏水性或許是強化壁虎黏著能力的一項原因。然而最重要的一點莫過於黏著在重覆性上的突破,與單層結構相比,特娜博士以顯而易見的實驗數據指出 MICS 結構在歷經多次的黏著作用依然能保有近乎相同的黏著特性,但反觀傳統單層結構卻是會隨著使用次數的增加而逐漸失去黏性。特娜博士發展出的製程技術不但提高壁虎貼布量產化的可能性,另對於以往仿生黏著所困難的重覆性課題提供了初步的解決之道。
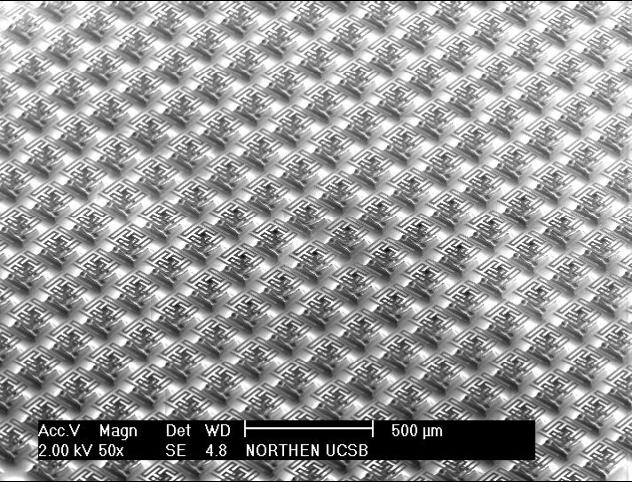
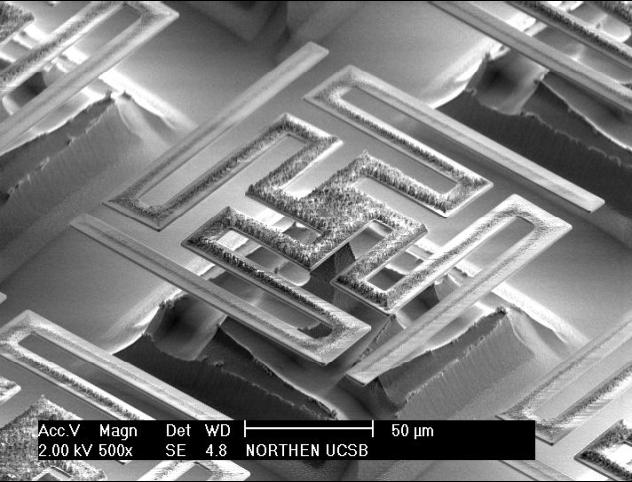
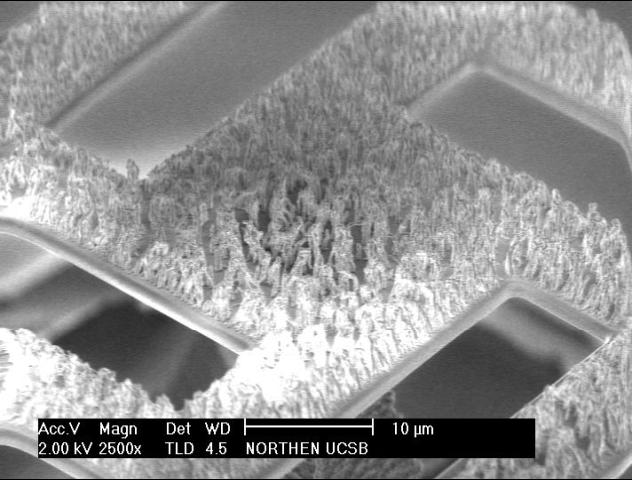
《圖 34
美國加州大學聖芭芭拉分校機械暨環境工程系的特娜博士 (Kimberly L. Turner) 與同樣來自材料系的麥可•羅森 (Michael T. Northen) 博士在二零零首次在矽晶圓上成功的以成批生產技術 ( batch fabrication techniques)運用微機電製程成功製造出整體化多尺度順從結構 ( Multi-scale Integrated Compliant Structures, MICS )
》Northen, M.T. and Turner, K.L., “Multi-scale compliant structures for use as a chip scale dry adhesive,” Transducers , 2 , 2044-2047. 2005.
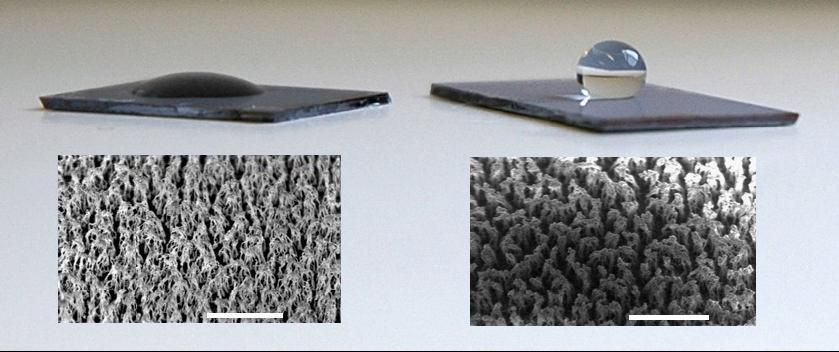
《圖 35
層次結構表面疏水特性將進一步提高黏著的力量 左:親水性 右:疏水性
》Northen, M.T. and Turner, K.L., “A batch fabricated biomimetic dry adhesive,” Nanotechnology , 16 , 1159-1166. 2005.
壁虎型機器人的發展
源於壁虎所帶來的靈感,二零零三年
卡內基梅隆大學機械系微型機器人實驗室(NanoRobotics Laboratory)
的斯提博士與菲爾 林 教授共同發表一篇文章探討攀牆機器人 ( Wallbot) 的可行性,由於這類能在垂直牆面執行任務並具有攀附能力的機器人,不但能夠在日常工作中確保人身安全,更能在 許多傳統機器無法勝任之處完成任務,例如 石油工業與核能發電廠的儲備槽檢驗、高樓大廈的清潔工作,甚至是太空站的修復。此類機器人以往多仰賴真空吸力與磁性效應而賦予其在垂直面的行動能力,但這兩種做法都有很大的缺點,磁性效應只能應用在具磁性的金屬表面,而真空吸力則受到氣壓與表面平坦度的限制,一旦斯提博士的想法成真,那麼具有壁虎黏著能力的機器人就不用再背著一台泵浦不斷的抽真空,也不用害怕會在凹凸不平的表面,以及非磁性的牆面上摔跤了。

《圖 36
源自壁虎靈感的攀牆型機器人
》Sitti, M. and Fearing, R.S. “Synthetic gecko foot-hair for micro/nano structures for future wall-climbing robots ,” Proc. IEEE Int. Conf. on Robotics and Automation , September 14-19, 1 , 1164-1170. 2003.
雖然人造壁虎貼布尚未成功實現,但基於這樣的想法,斯提博士與其研究同仁針對攀牆機器人的設計,不斷進行許多力學以及運動模式方面的分析,並有相當亮眼的成果。二零零四年他們首度提出兩種源於壁虎創意的攀牆機器人,一種是左右輪上各有三個黏墊的輪足型機器人,另一個則是如戰車般具有黏性履帶的履式機器車,雖然所使用的是傳統的黏膠,但這兩種機器人都能在平滑的垂直面上行進。
二零零五年,斯提博士們除了對輪足型機器人作改良,克服轉彎的限制之外,當遭遇行進過程的過渡區,也能使輪足型機器人穩穩的從水平面爬上垂直的牆角,至於在一百一十度的狀態下更可達到每秒六釐米的速度。
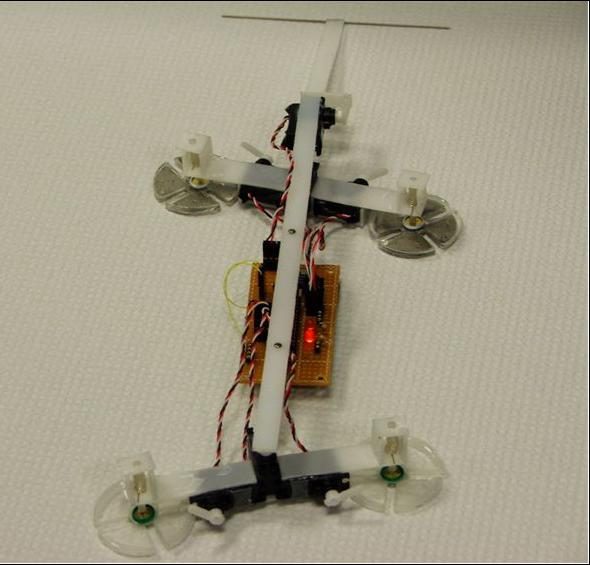
《圖 37
二零零四年提出兩種源於壁虎創意的攀牆機器人,此為左右輪上各有三個黏墊的輪足型機器人
》
C. Menon, M. Murphy, and M. Sitti, “Gecko Inspired Surface Climbing Robots”, IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenyang City , China , 2004.
但稀奇的還不只這個,經過對壁虎步伐和力學作詳細分析後,更發展出一具在運動上與壁虎相似的壁虎型機器人 (Geckobot) ,同樣能夠順利的行進與轉向,並可攀爬角度為八十五度的平面過渡區,移動速度為每秒一釐米,此外這兩種機器人都可透過紅外線通訊達到半自動化控制。斯提博士們的下一階段除了要將壁虎型機器人對過渡區攀爬的能力提升到九十度的垂直面,更致力於完成具有乾燥、可重覆性高與自我清潔特性的壁虎貼布,以取代人工黏著劑的缺點,相信在不久的將來,無論是壁虎貼布或是壁虎機器人,將會在出現你我的眼前,並成為下一回文明科技的注目焦點。
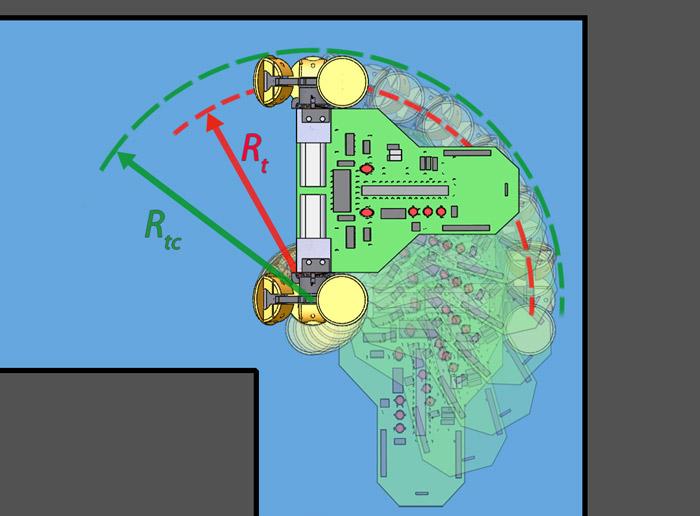
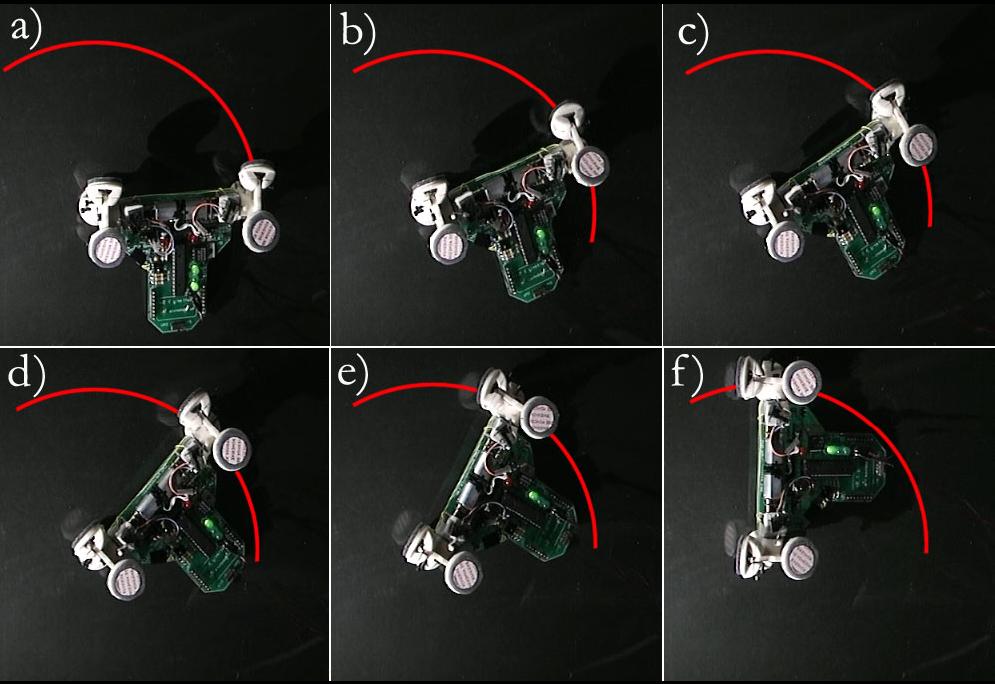
《圖 38
二零零五年斯提博士研究團隊經壁虎步伐與力學上的分析,發展出運動上與壁虎相似的壁虎型機器人 (Geckobot)
》
O. Unver, M. Murphy, M. Sitti, "Geckobot and Waalbot: Small-Scale Wall Climbing Robots" AIAA 5th Aviation, Technology, Integration, and Operations Conference (ATIO) , Arlington , Virginia Sept. 2005.